|
设置
|
描述
|
|
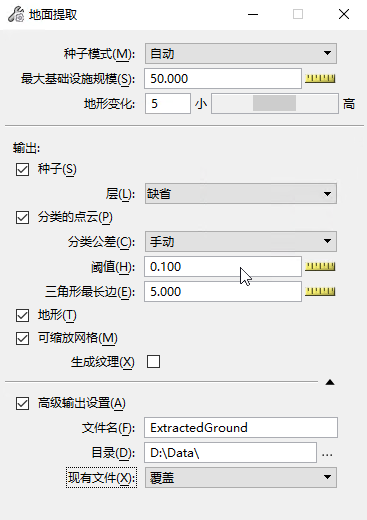
种子模式
|
选择种子点的起源。
- 自动:最大基础设施规模参数用于计算实景模型上的网格。每个图块中的最低点用作种子点。
- 点: 将在选定 DGN 级别中找到的元素的顶点用作种子点。
键入命令: REALITYMODEL GROUNDEXTRACTION SEEDMODE
[AUTOMATIC | POINTS]
键入命令: REALITYMODEL GROUNDEXTRACTION
LEVEL
键入命令: POINTCLOUDADV GROUNDEXTRACTION
SEEDMODE [AUTOMATIC | POINTS]
键入命令: POINTCLOUDADV GROUNDEXTRACTION
LEVEL
|
|
最大基础设施规模
|
实景模型中最大人造物体的最小端。当使用此值计算网格时,每个网格的图块必须至少包含一个地面点。
键入命令: REALITYMODEL GROUNDEXTRACTION
MAXTRIANGLEEDGE
键入命令: POINTCLOUDADV GROUNDEXTRACTION
MAXTRIANGLEEDGE
|
|
地形变化
|
实景模型的地形平坦时使用较小的值,地形多山时使用较高的值。缺省值为 5。
键入命令: REALITYMODEL GROUNDEXTRACTION
TERRAINVARIATION
键入命令: POINTCLOUDADV GROUNDEXTRACTION
TERRAINVARIATION
|
|
输出
|
必须至少选择以下输出之一:
|
|
种子
|
将自动种子点保存到选定的 DGN 级别。通过选择点种子模式,可以编辑和重复使用保存的种子点。
键入命令: REALITYMODEL GROUNDEXTRACTION SEEDS
[ON | OFF]
键入命令: REALITYMODEL GROUNDEXTRACTION
LEVEL
键入命令: POINTCLOUDADV GROUNDEXTRACTION SEEDS
[ON | OFF]
键入命令: POINTCLOUDADV GROUNDEXTRACTION
LEVEL
|
|
地形
|
将增密的 TIN 保存到 Geopak Tin 文件 (*.tin) 中,并自动生成和连接可缩放地形模型。
键入命令: REALITYMODEL GROUNDEXTRACTION TERRAIN
[ON | OFF]
键入命令: POINTCLOUDADV GROUNDEXTRACTION
TERRAIN [ON | OFF]
|
|
分类的点云
|
自动对增密 TIN 阈值内的地面点进行分类。当实景模型为实景网格时,根据实景网格的导出分辨率提取点云并进行分类。 分类公差:
- 自动:使用最后一个增密化参数来计算分类阈值。
- 手动:指定分类阈值。
键入命令: REALITYMODEL GROUNDEXTRACTION CLASSIFY
[ON | OFF]
键入命令: REALITYMODEL GROUNDEXTRACTION
CLASSIFYMETHOD [AUTO | MANUAL]
键入命令: REALITYMODEL GROUNDEXTRACTION
CLASSIFYTHRESHOLD
键入命令: POINTCLOUDADV GROUNDEXTRACTION
CLASSIFY [ON | OFF]
键入命令: POINTCLOUDADV GROUNDEXTRACTION
CLASSIFYMETHOD [AUTO | MANUAL]
键入命令: POINTCLOUDADV GROUNDEXTRACTION
CLASSIFYTHRESHOLD
|
|
三角形最长边
|
停止在边长值小于该阈值的三角形内添加地面点。
键入命令: REALITYMODEL GROUNDEXTRACTION
MAXTRIANGLEEDGE
键入命令: POINTCLOUDADV GROUNDEXTRACTION
MAXTRIANGLEEDGE
|
|
高级输出设置
|
打开高级设置,以自动创建输出文件。
键入命令: REALITYMODEL GROUNDEXTRACTION
ADVANCESETTINGS [ON | OFF]
键入命令: POINTCLOUDADV GROUNDEXTRACTION
ADVANCESETTINGS [ON | OFF]
|
|
文件名
|
自动创建输出文件时要使用的文件名。
键入命令: REALITYMODEL GROUNDEXTRACTION
FILENAME
键入命令: POINTCLOUDADV GROUNDEXTRACTION
FILENAME
|
|
目录
|
自动创建输出文件时要使用的目录。
键入命令: REALITYMODEL GROUNDEXTRACTION
DIRECTORY
键入命令: POINTCLOUDADV GROUNDEXTRACTION
DIRECTORY
|
|
现有文件
|
选择当自动创建的输出文件已经存在时要执行哪些操作。
键入命令: REALITYMODEL GROUNDEXTRACTION
EXISTINGFILE [OVERWRITE | INCREMENT]
键入命令: POINTCLOUDADV GROUNDEXTRACTION
EXISTINGFILE [OVERWRITE | INCREMENT]
|